

Navidad para ma(r)kers: Adornos navideños personalizados hechos por un robot

Un Spherebot o Eggbot dibuja patrones desde un PC en cualquier cosa que sea redonda. En thingiverse.com e instructables.com se pueden encontrar varios tutoriales y plantillas para estos pequeños robots, que también podrían llamarse trazadores de esferas. La lista de materiales es bastante similar para la mayoría de los Spherebots. Se necesitan dos motores Nema 17, un pequeño servo, un Arduino Uno, un shield CNC y drivers para motores paso a paso. Además, se necesita una fuente de alimentación, tornillos, cables, bolas y marcadores a juego. En Amazon, la lista completa de materiales tiene un precio que ronda los 50 dólares. Si tienes una impresora 3D, probablemente puedas tomar prestados sus caros motores Nema 17 y los controladores de los motores paso a paso para el proyecto

Instrucciones y manuales de construcción
Hay muchas instrucciones más o menos simples para un Eggbot en varias páginas de bricolaje comoinstructables y thingiverse. La mayoría de ellos se pueden hacer con una impresora 3D. Al menos 20 de esos Eggbots se pueden encontrar con diversos nombres a través de thingiverse.com. He reunido una pequeña selección en una colección aquí. Los aficionados con recursos probablemente puedan prescindir de una impresora 3D para algunos diseños y trabajar sólo con madera contrachapada, tornillos, rodamientos y algunos soportes. Elegí el diseño de Herbert Schützeneder, que, en mi opinión, es muy inteligente. La mayoría de las piezas de su Eggbot están impresas en 3D. Básicamente, la lista de la compra es muy similar para la mayoría de los Eggbots. Esto también se debe a que el original de Evil Mad Scientist ha estado disponible como un proyecto de código abierto durante varios años. Por lo tanto, en su mayor parte, sólo son necesarios ajustes para adaptar las réplicas a los diferentes métodos de fabricación.
Lista de materiales para el Eggduino por Herbert_b1:
2 × Motor paso a paso Nema 17
1 × CNC-Kit con clon de Arduino Uno
1 × Servomotor SG90 o KY66
1 × tornillos M3
1 × rodamiento de bolas 608
1 × condensador de 10 µF a 100 µF
1 × convertidor CA/CC que proporcione una tensión entre 12 V y 24 V
algunos rotuladores (permanentes)

En mi caso, los motores paso a paso y los drivers del motor paso a paso TMC2100 provienen de una impresora 3D que ya no está en uso. Como fuente de alimentación utilizo un viejo ladrillo de ordenador portátil con 19 V. El mayor voltaje es más una ventaja para el CNC-Shield ya que el clon de Arduino Uno se alimenta por USB. Con el mayor voltaje, los motores pueden ser accionados con menos corriente. Esto resulta en una menor disipación de calor en los motores y la electrónica. Tampoco tuve que comprar un rodamiento de bolas, ya que los rodamientos de bolas 608 son los mismos que los de los monopatines y patines en línea.
Software - Descarga, instalación y modificación
El Arduino Uno (clon) es programable mediante el IDE de Arduino. La aplicación se puede descargar de www.arduino.cc/en/software o adquirida de varias fuentes. En Windows, la aplicación también está disponible para su instalación a través de la Microsoft Store
Para crear las imágenes y los patrones de la bola del árbol de Navidad, la aplicación de código abierto Inkscape con la extensión EggBot. La última versión 1.1 puede descargarse a través de en la página de lanzamiento.
Un firmware listo para usar para el Arduino Uno (clon) está disponible en Github en el repositorio Eggbot por Plex3r. Aquí puedes iniciar la descarga de como archivo zip haciendo clic en el elemento de código verde. Las instrucciones de Plex3r para modificar la extensión del Eggbot desafortunadamente no funcionan con las nuevas versiones de software.
La última versión de EggBot 2.81 se descarga desde el repositorio de Evil Mad Scientist y se modifica en su lugar. Necesitarás los dos archivos eggbot-inkv1r2.zip y EggBotExamples_v281.zip de la carpeta de lanzamiento.
Programando el Arduino Uno
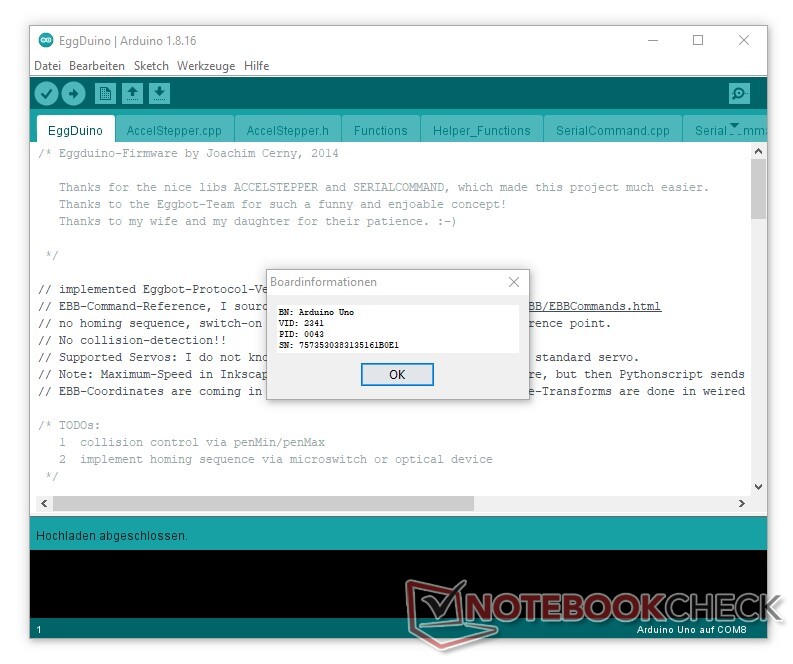
Tras la instalación del IDE de Arduino, abre el archivo EggDuino-master.zip y descomprímelo en la carpeta de usuario Documentos/Arduino. Para que el IDE pueda trabajar con el contenido de la carpeta, ésta debe ser renombrada como EggDuino. Haz doble clic en EggDuino.ino en la carpeta renombrada EggDuino para abrir el archivo. Ahora puedes conectar el Arduino Uno (clon) al ordenador mediante un cable USB. Selecciona la placa con Herramientas>Puerto. Luego subes el programa tal cual. Más tarde, se conecta todo de manera que coincida el pinout programado.
El ID del hardware de la placa de desarrollo es necesario para adaptar la extensión EggBot para Inkscape al EggDuino en el siguiente paso. Este ID puede ser recuperado con el IDE de Arduino a través de Herramientas>Obtener información de la placa. El VID y el PID pueden ser copiados con CTRL+C y luego pegados en un archivo de texto.



Instalación y modificación de la extensión EggBot
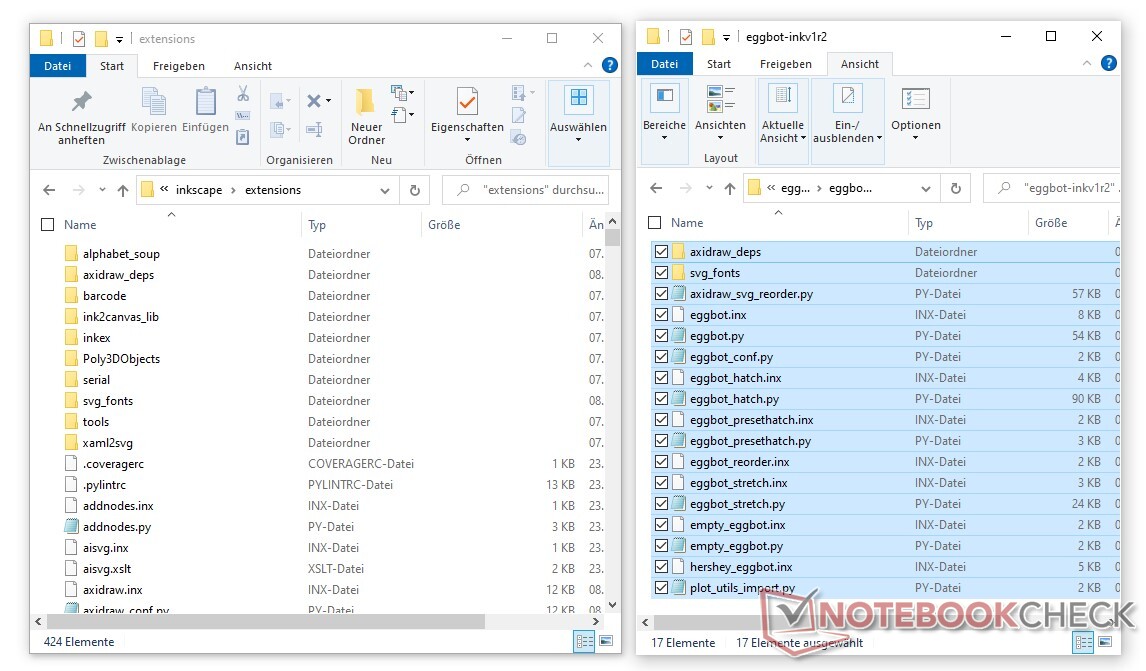
El archivo zip eggbot-inkv1r2.zip contiene la extensión completa de EggBot para Inkscape. Sin embargo, esta extensión tiene que ser adaptada al EggDuino antes de que pueda ser integrada en Inkscape. Primero descomprima el archivo en un lugar arbitrario. En la carpeta descomprimida, busque el archivo ebb_serial.py. Este se encuentra bajo eggbot-inkv1r2axidraw_depsplotink. Abierto con el editor, el script de Python puede ser editado. En la línea 65 [ if port[2].startswith("USB VID:PID=04D8:FD92"): ] el ID del hardware del EggBot original es buscado por el script. Este debe ser cambiado por el Eggduino con los valores previamente determinados para VID y PID.
Así que en mi caso la nueva línea es [ if port[2].startswith("USB VID:PID=2341:0043"): ]
Dado que no todos los Arduino Uno y sus clones tienen el mismo hardware-ID simplemente copiando mi cambio puede no llevar al éxito.

Después de guardar la modificación, todo el contenido de la carpeta eggbot-inkv1r2 será transferido a la carpeta de extensiones de Inkscape 1.1. Si el directorio de instalación por defecto no ha sido cambiado durante la instalación, se encuentra en
C:NArchivos de programaNInkscapeshareinkscapeextensions
Si ahora abre Inkscape, debería encontrar Eggbot en Extensiones.

Montaje
El montaje general de los componentes debería ser sencillo, pero el cableado puede ser un poco complicado. Dado que el Arduino Uno es muy indulgente, los errores no son, en general, un gran problema
controladores de motores paso a paso

En primer lugar, hay que configurar los puentes para ajustar el micropaso. Dependiendo del controlador del motor paso a paso, los puentes tienen que ser ajustados de manera diferente. La idea es conseguir un micropaso de 1/16. Con los drivers A4988 incluidos en el Kit CNC del enlace anterior, los tres puentes deben ser ajustados. En la imagen de la derecha, los lugares correspondientes están marcados en verde y las conexiones en amarillo. M0, M1 y M2 tienen que estar conectados. Para el Eggbot sólo son necesarios los motores X e Y

En el siguiente paso, se pegan los disipadores de calor en los drivers del motor paso a paso y se enchufan los drivers en las ranuras para X e Y. Aquí hay que prestar atención a la alineación. Normalmente, el pin EN está marcado en todos los drivers de motor paso a paso compatibles con Pololu. Este debe conectarse al enchufe EN en el CNC-shield, sólo entonces la alineación es correcta
Por favor, consulte la hoja de datos del respectivo fabricante para obtener información sobre los voltajes y los ajustes para el micropaso y la corriente.
Desactivando el auto reset del Arduino Uno


Para una correcta conexión con Inkscape, es necesario desactivar el auto-reset en el Arduino. La primera posibilidad es desconectar un contacto en el Arduino UNO. En las placas siempre hay un contacto de puente, que está marcado como REST-EN o REST-ON. Después de programar la placa, este contacto se puede desconectar con un cuchillo. Si se necesita el auto-reset de nuevo, se puede poner un puente de soldadura.
También es posible desactivar el auto-reset con un condensador entre el pin de reset y el pin GND en el CNC-shield. El condensador debe tener una capacidad de al menos 10 µF. Un condensador electrolítico se suelda con su pin negativo en el pin GND del CNC-Shield. Los condensadores cerámicos y de lámina no tienen polaridad. La rigidez dieléctrica del condensador debe ser al menos 1,5 veces la tensión de la fuente de alimentación seleccionada.
Cableado
Todos los Eggbots utilizan dos motores paso a paso y un servo. El motor paso a paso que hace girar la bola o el huevo está conectado a los contactos del controlador X, el motor paso a paso para el brazo de la pluma está conectado a los contactos junto al controlador Y. La forma en que se conectan los dos conectores sólo cambia el sentido de giro. Esto se puede invertir más tarde en Inkscape.
Los tres cables del servomotor se conectan a los pines 5V, GND y Z.STEP del CNC-Shield. El cable negro a GND, el rojo a 5V y el amarillo a Z.STEP.


Configuración y trazado del software
Una vez que todo está montado, se puede conectar el Arduino al PC y el CNC-Shield a la fuente de alimentación. En Inkscape ahora se llama al panel de control del Eggbot, y aquí todavía hay que establecer los ajustes para el servomotor y la dirección de rotación de los motores paso a paso. Para encontrar los ajustes correctos tienes que llevar a cabo algunos experimentos.
En la pestaña Manual, primero puedes determinar la dirección de rotación del brazo de la pluma. Selecciona Motor de paso 1 (Pluma) en el menú desplegable e introduce un valor positivo debajo y haz clic en Aplicar. El bolígrafo debería ahora moverse hacia la punta del adorno con el gancho. Entonces, dependiendo de la dirección en la que quieras sujetar las bolas, esto es hacia la izquierda o hacia la derecha. Repita el mismo proceso con el elemento de menú seleccionado, Motor de Paseo 2 (Huevo). La bola debe girar en el sentido de las agujas del reloj cuando se ve desde el punto de suspensión.
Si los sentidos de rotación no coinciden, hay que activar o eliminar la casilla Movimiento inverso del motor correspondiente en la pestaña Opciones.




También hay que ajustar los valores del servomotor. Aquí depende de si tienes un servomotor con sentido de giro positivo o negativo. En mi caso, el valor a ajustar en el Eggbot Control Setup para la posición de pluma arriba es menor que el de la posición de pluma abajo. Puede que tengas que probar un par de valores para encontrar los correctos.
Trazando

Una vez que todo está ensamblado, instalado y configurado, puedes finalmente empezar a dibujar. En el archivo EggBotExamples_v281.zip hay algunas plantillas para diferentes ocasiones. Estas pueden ser cargadas, modificadas y dibujadas como de su deseo. El archivo EggBotTemplate.svg sirve como plantilla para tus diseños. Al abrir algunas plantillas, Inkscape probablemente preguntará si hay que cambiar algo en los archivos, ya que fueron creados con una versión anterior de Inkscape. La nueva extensión de Eggbot ha sido adaptada a Inkscape 1.1 de forma que tienes que seleccionar aquí "Este archivo está destinado a la visualización en pantalla[...]", de lo contrario la salida en el Eggbot se verá distorsionada.
Con el diseño terminado, no necesitas hacer nada más que trazarlo a través del Centro de Control del Eggbot. Sólo tienes que hacer clic en "Aplicar" en la pestaña de Trazado.

Fuentes

